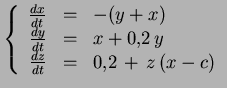
En este trabajo se usa en cada celda un oscilador de Rösler (ver ec. 6) acoplado por el método de control de Pyragas[14] con condiciones elegidas al azar para cada ensayo.
Dicho oscilador caótico es el único que ha mostrado evidencia de mantener un andar primario, en cambio tanto el oscilador de Van der Pool[7], como el de Showalter[15], si bien bajo ciertas condiciones simula el envío de pulsos nerviosos, bajo el método de sincronización usado no muestra igualdad de forma de onda en las señales de salida. Este no es un detalle menor pues simplifica mucho el diseño electrónico cuando la forma de onda de cada oscilador simula un andar primario. Esta condición, igualdad de formas de onda de salida, es importante en el comando digital de extremidades mecánicas[16].
Utilizando un mecanismo de sincronización directa[17],
la variable maestra es ![]() y las variables esclavas son
y las variables esclavas son ![]() .
Se utiliza una serie temporal de índice limitado para obtener el valor de
la realimentación desfasada.
En consecuencia de esto la función de acoplamiento es de la forma:
.
Se utiliza una serie temporal de índice limitado para obtener el valor de
la realimentación desfasada.
En consecuencia de esto la función de acoplamiento es de la forma:
donde ![]() y
y ![]() son constantes.
Las condiciones de simetría asociadas a la red Tipo-2 limitan el rango de
valores que deben tener las constantes
son constantes.
Las condiciones de simetría asociadas a la red Tipo-2 limitan el rango de
valores que deben tener las constantes ![]() y
y ![]() ,
en este caso se debe cumplir
,
en este caso se debe cumplir ![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() y
y ![]() .
El valor del retardo
.
El valor del retardo
![]() y la constante
y la constante
![]() del oscilador de Rösler (ver ec. 6),
juegan un rol importante en los patrones de las funciones de onda obtenidas.
del oscilador de Rösler (ver ec. 6),
juegan un rol importante en los patrones de las funciones de onda obtenidas.
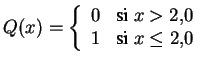
Se toma como salida de cada oscilador al valor de la variable ![]() ,
afectado por la función umbral
,
afectado por la función umbral
Esto define una aplicación del espacio de las fases al espacio de las matrices binarias de dimensión 2x2. Por conveniencia al valor 1 se le asocia al estado extremidad apoyada en cambio al estado 0 se le asocia el estado extremidad en movimiento no apoyada. Finalmente la representación matricial del GCP es de ahora en más

De ahora en más se usará los siguientes modelos ad hoc que
se llamarán: SA a la condición
![]() y
y
![]() ; y SB a
; y SB a
![]() y
y
![]() .
Una de las razones para la
elección de estos valor es, la presunción que
existe una fuerte coordinación de
extremidades asociadas a cada hemisferio, en cambio
existe una pobre correlación
entre extremidades asociadas a hemisferios cerebrales diferentes.
.
Una de las razones para la
elección de estos valor es, la presunción que
existe una fuerte coordinación de
extremidades asociadas a cada hemisferio, en cambio
existe una pobre correlación
entre extremidades asociadas a hemisferios cerebrales diferentes.
![]() La otra es, que
en los valores propuestos los resultados obtenidos en las simulaciones,
son en una
gran proporción coincidentes a los hechos empíricos
La otra es, que
en los valores propuestos los resultados obtenidos en las simulaciones,
son en una
gran proporción coincidentes a los hechos empíricos