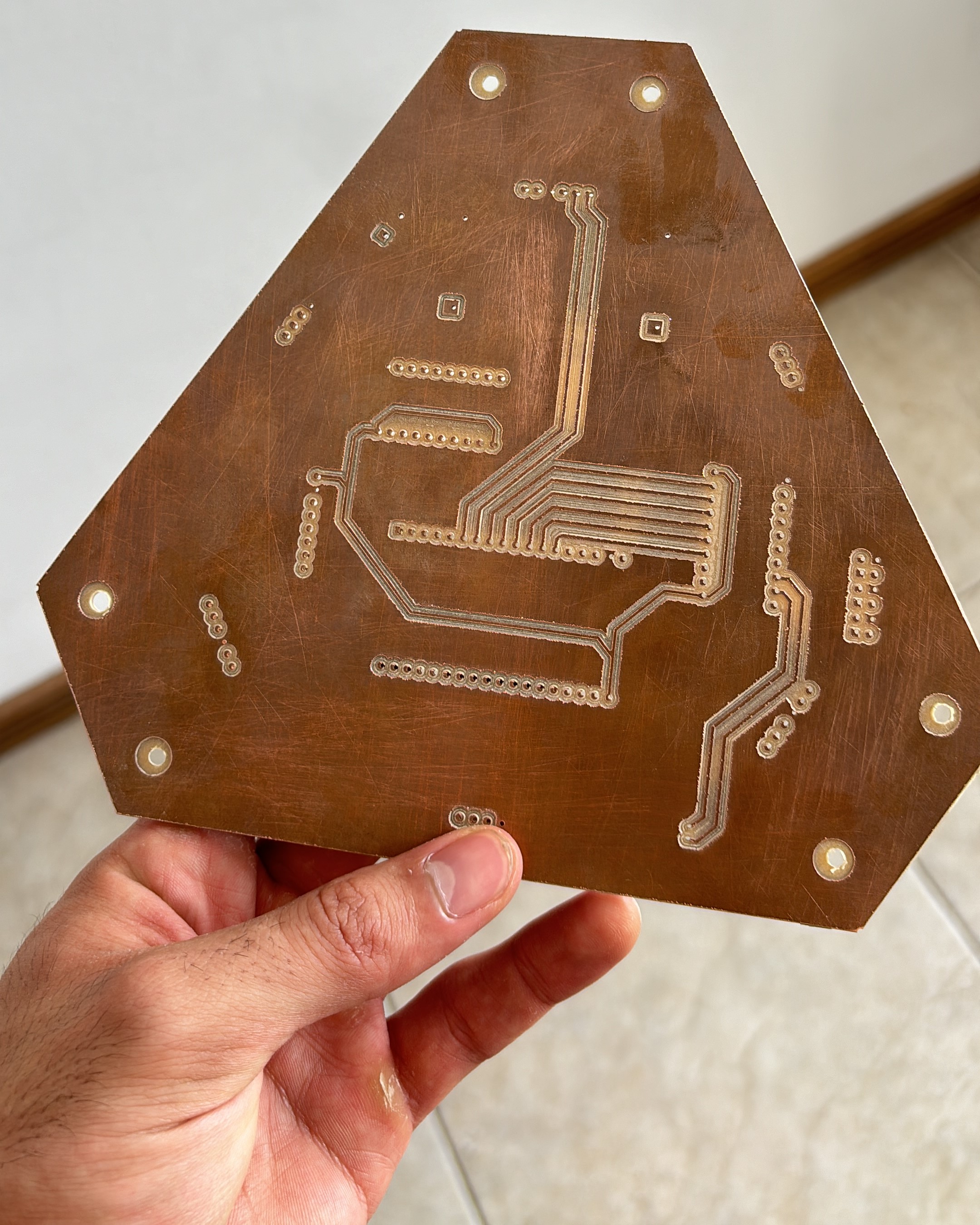
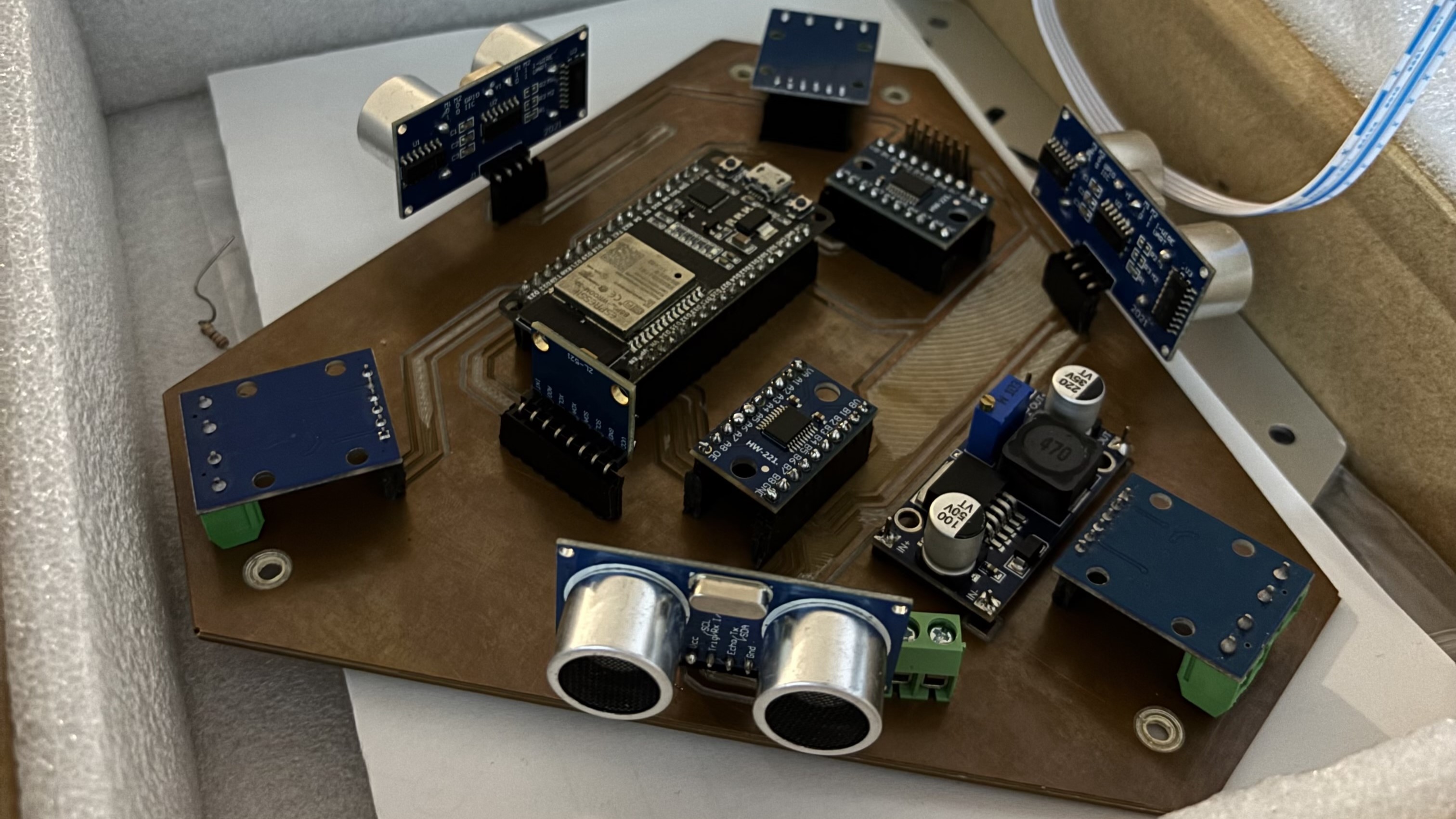
Placa doble faz
Para flota de tres bases moviles holonómicas con control multiagente.
Realizado por estudiantes de la carrera Ing. Electrónica


Para flota de tres bases moviles holonómicas con control multiagente.
Realizado por estudiantes de la carrera Ing. Electrónica